Investigadores de Caltech han construido un robot bípedo que combina caminar con volar para crear un nuevo tipo de locomoción, lo que lo hace más ágil y capaz de realizar movimientos complejos.
En parte un robot que camina, en parte un dron volador, el LEONARDO (abreviatura de LEgs ONboARD drOne, o LEO para abreviar) puede caminar en una cuerda floja como los equilibristas, saltar e incluso moverse en monopatín. Desarrollado por un equipo del Centro de Tecnologías y Sistemas Autónomos (CAST) de Caltech, LEO es el primer robot que utiliza patas de articulaciones múltiples y propulsores basados en hélices para lograr un buen grado de control sobre su equilibrio.
Un artículo sobre el robot LEO se publicó en línea y es portada de octubre en Science Robotics. Sus evoluciones pueden verse en https://www.youtube.com/watch?v=DhpMlI8jb5o .
Los robots bípedos son capaces de abordar terrenos complejos del mundo real utilizando el mismo tipo de movimientos que utilizan los humanos, como saltar, correr o incluso subir escaleras, pero están obstaculizados por terrenos accidentados. Los robots voladores navegan fácilmente por terrenos difíciles simplemente evitando el suelo, pero se enfrentan a sus propias limitaciones: alto consumo de energía durante el vuelo y capacidad de carga útil limitada.
«Los robots con una capacidad de locomoción multimodal pueden moverse a través de entornos desafiantes de manera más eficiente que los robots tradicionales al alternar adecuadamente entre sus medios de movimiento disponibles. En particular, LEO tiene como objetivo cerrar la brecha entre los dos dominios dispares de locomoción aérea y bípeda que son normalmente no se entrelazan en los sistemas robóticos existentes», dice en un comunicado Kyunam Kim, investigador postdoctoral en Caltech y coautor principal del artículo de Science Robotics.
Al utilizar un movimiento híbrido que se encuentra en algún lugar entre caminar y volar, los investigadores obtienen lo mejor de ambos mundos en términos de locomoción. Las piernas ligeras de LEO eliminan la tensión de sus propulsores al soportar la mayor parte del peso, pero debido a que los propulsores se controlan sincrónicamente con las articulaciones de las piernas, LEO tiene un equilibrio asombroso.
Según los tipos de obstáculos que necesita atravesar, LEO puede elegir entre caminar o volar, o combinar los dos según sea necesario. Además, LEO es capaz de realizar maniobras de locomoción inusuales que incluso en humanos requieren un dominio del equilibrio, como caminar en una cuerda floja o moverse en monopatín.
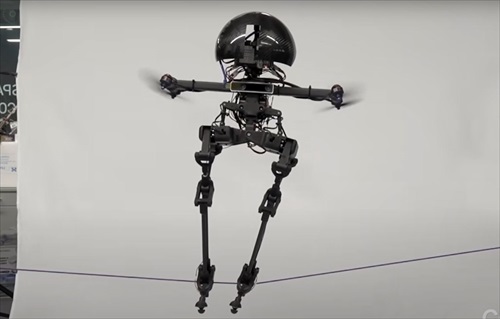
LEO mide 76 centímetros de alto y está equipado con dos patas que tienen tres articulaciones accionadas, junto con cuatro propulsores de hélice montados en ángulo en los hombros del robot. Cuando una persona camina, ajusta la posición y orientación de sus piernas para hacer que su centro de masa se mueva hacia adelante mientras se mantiene el equilibrio del cuerpo.
LEO también camina de esta manera: las hélices aseguran que el robot esté en posición vertical mientras camina, y los actuadores de las piernas cambian la posición de las piernas para mover el centro de masa del robot hacia adelante mediante el uso de un controlador sincronizado para caminar y volar. En vuelo, el robot usa sus hélices solo y vuela como un dron.



